
| Home |
|
Short Presentation |
|
Mechanical Constraints |
|
Misalignment Studies |
|
Alignment Techniques |
|
Application to VELO |
| C++ code |
| Latest News |
| Links |
| Home |
|
Short Presentation |
|
Mechanical Constraints |
|
Misalignment Studies |
|
Alignment Techniques |
|
Application to VELO |
| C++ code |
| Latest News |
| Links |
VELO Mechanical Constraints
1. The context
We have to consider two different types of misalignments: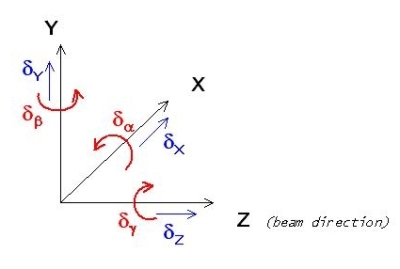
2. Half-box misalignments scales (NIKHEF)
2.1 Translations
Alignment of the detector halves is expected to be done with a 0.5mm accuracy at the installation. However, as we said in the previous part, detector halves could be mechanically translated on x and y axis. The scale of these translations is +/- 5mm with an expected precision of 5 micrometers.2.2 Rotations
Rotations are more critical, since they couldn't be corrected mechanically when VELO is on operation. In particular, rotations around X and Y axis will lead to bad vertex fit efficiency. Rotation around Z seems less annoying "a priori", however its effect (on overlap tracks for example) should be estimated.3. Sensor misalignments scales (LIVERPOOL)
3.1 Translations
According to VELO TDR, a 20 micrometers alignment of each individual modules within an half box is required. Then, the sensors are expected to be aligned to the module base with a 10 micrometers accuracy, and alignment between R and Phi sensor could be obtained by construction with a precision better than 5 micrometers.3.2 Rotations
Precise informations concerning individual sensors rotations are missing. However, individual sensors misalignment study shows clearly that if rotations around X and Y axis are not to worrying for physics measurements, rotations around Z axis could have a large effect. A 5mrad Z rotation will lead to a track efficiency reduction of 30%.4. Conclusion
Mechanical constraints on misalignments parameters should be measured. Even if we could use the expected values for misalignment effects studies, precise estimations will be useful for alignment algorithm development, and in order to dertermine the relevant parameters.