Application to the VELO
2. VELO algorithm (Part IV)
E. Alignment within GAUDI
E1. About the code
E1a. Where could you find it?
A first version VELO alignment code is now commited on
LHCb CVS repository, under the
Alignment branch. The code is divided into 2 different packages:
AlignmentTools and
VeloAlignment. AlignmentTools contains the Millepede Gaudi implementation, and thus could be used directly by other sub-detectors in order to perform their own alignment. VeloAlignment provides the interface between tracks and Millepede, in the case of the VELO.
E1b. How to run it?
E2. Algorithm description
The alignment code is intended to work on reconstructed tracks. The code described here is then intended to run within
Brunel . The basic flow is described on Fig.1.
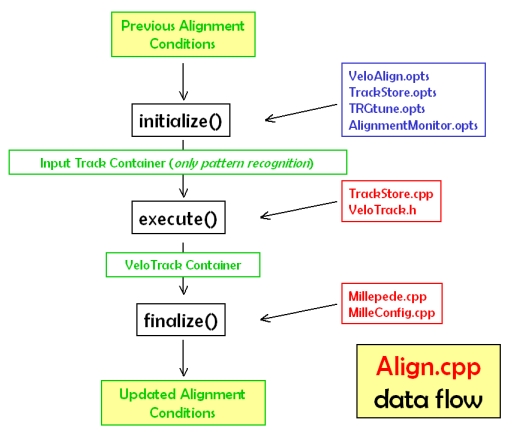
1. Alignment code into GAUDI.
E1a. Initialization.
The alignment conditions are retrieved during the
initialize() method. The way to do this could be found on the condition database introduction
webpage.
Other initializations are set via 4 joboptions files:
- VeloAlign.opts : contains the VELO geometry information, ie all the parameters defining the sensors to be aligned. Also contains the main alignment job options related to Millepede tuning.
- TrackStore.opts : the tracks used for the alignment must satisfy specific criteria. These cuts (minimal number of hits, momentum cut, overlap cut,...) are handled trough this joboption file.
- TRGtune.opts : the pre-tracks used during the execute() method are coming from the different VELO pattern recognition algorithms (PatVelo). These algorithms have to be tuned in order to work with misalignments. This option file contains these tunings.
- AlignmentMonitor.opts :
E1b. Execution.
The
execute() method is used for the track selection. This selection is handled by a GAUDI tool:
TrackStore, via the method
TransformTrack(). This method takes a reconstructed track in input (at the pattern recognition level). The output is a
VeloTrack, a specific object containing all the necessary information for our alignment algorithm (Millepede "friendly" coordinates, event number,...). If the considered track satisfies the cuts required in the joboptions, it's stored in a
VeloTrack container.
E1c. Finalization.
The
Millepede tool is instantiated here, via the
InitMille() method. This initialization takes into account the geometry and configuration requests contained in
VeloAlign.opts. All this features tends to make the code as flexible as possible, in order to be usable not only during normal running but also during testbeam period, as shown
here.
After the tool initialization, Millepede is feeded with
VeloTracks, via the method
PutTrack(). This process is quite quick, as the
VeloTrack is already in the expected format. Specific methods are used for primary vertices and for overlapping tracks.
Finally, the global fit is performed via the method
MakeGlobalFit(), which gives
in output the alignment constant values and the corresponding errors.
This method is used three times: for each box internal alignment, then for the boxes alignment itself. Before this last step,
VeloTracks are updated in order to take into account internal misalignments. Then, we estimate the Z coordinate at the track closest approach to the beam (Zclos), and store this parameter into the
VeloTrack.
With those information, we are able to look for primary vertices. We just have to find peaks in the Zclos distribution of all the tracks. If the peak is OK for us (peak requested properties are set in VeloAlign.opts), we tag the tracks with a Zclos value within the peak.
Once the global alignment is performed, one just need to update the alignment conditions, this is the last operation of the alignment algorithm (
this part is still not yet completely implemented).
E2. Results
Results obtained with this code are extensively described in the different notes on VELO alignment. Latest results using the geometry framework could be found in the previous parts.
...Go to the next part...
